#include <restart_state.hpp>
|
| | RestartLeaderState (std::unique_ptr< View > _curr_view, RestartState &restart_state, const SubgroupInfo &subgroup_info, const node_id_t my_id) |
| |
| void | await_quorum (tcp::connection_listener &server_socket) |
| | Waits for nodes to rejoin at this node, updating the last known View and RaggedTrim (and corresponding longest-log information) as each node connects, until there is a quorum of nodes from the last known View and a new View can be installed that is adequately provisioned. More...
|
| |
| bool | has_restart_quorum () |
| | Checks to see whether the leader has achieved a restart quorum, which may involve recomputing the restart view if the minimum number of nodes have rejoined. More...
|
| |
| bool | resend_view_until_quorum_lost () |
| | Repeatedly attempts to send a new restart view, recomputing it on each failure, until either there is no longer a restart quorum or the view was sent successfully to everyone. More...
|
| |
| int64_t | send_restart_view () |
| | Sends the currently-computed restart view, the current ragged trim, the current location of the longest logs (the "shard leaders"), and the DerechoParams to all members who are currently ready to restart. More...
|
| |
| void | send_abort () |
| | Sends an Abort message to all nodes that have previously been sent the restart View, indicating that they must go back to waiting for a new View. More...
|
| |
| int64_t | send_prepare () |
| | Sends a Prepare message to all members who are currently ready to restart; this checks for failures one more time before committing. More...
|
| |
| void | send_commit () |
| | Sends a Commit message to all members of the restart view, then closes the TCP sockets connected to them. More...
|
| |
| const View & | get_curr_view () const |
| | Read the curr_view (last known view) managed by RestartLeaderState. More...
|
| |
| const View & | get_restart_view () const |
| | Read the current restart view managed by RestartLeaderState. More...
|
| |
| std::unique_ptr< View > | take_restart_view () |
| | Remove and return the restart view managed by RestartLeaderState; this will take ownership back to the caller (ViewManager). More...
|
| |
| void | print_longest_logs () const |
| |
Definition at line 80 of file restart_state.hpp.
◆ RestartLeaderState()
◆ await_quorum()
Waits for nodes to rejoin at this node, updating the last known View and RaggedTrim (and corresponding longest-log information) as each node connects, until there is a quorum of nodes from the last known View and a new View can be installed that is adequately provisioned.
- Parameters
-
| server_socket | The TCP socket to listen for rejoining nodes on |
Definition at line 103 of file restart_state.cpp.
◆ compute_restart_view()
| bool derecho::RestartLeaderState::compute_restart_view |
( |
| ) |
|
|
private |
Recomputes the restart view based on the current set of nodes that have rejoined (in waiting_join_sockets and rejoined_node_ids).
This just ties together update_curr_and_next_restart_view and make_subgroup_maps.
- Returns
- True if the restart view would be adequate, false if it would be inadequate.
Definition at line 251 of file restart_state.cpp.
◆ contains_at_least_one_member_per_subgroup()
| bool derecho::RestartLeaderState::contains_at_least_one_member_per_subgroup |
( |
std::set< node_id_t > |
rejoined_node_ids, |
|
|
const View & |
last_view |
|
) |
| |
|
static |
- Returns
- true if the set of node IDs includes at least one member of each subgroup in the given View.
Definition at line 500 of file restart_state.cpp.
◆ get_curr_view()
| const View& derecho::RestartLeaderState::get_curr_view |
( |
| ) |
const |
|
inline |
◆ get_restart_view()
| const View& derecho::RestartLeaderState::get_restart_view |
( |
| ) |
const |
|
inline |
◆ has_restart_quorum()
| bool derecho::RestartLeaderState::has_restart_quorum |
( |
| ) |
|
Checks to see whether the leader has achieved a restart quorum, which may involve recomputing the restart view if the minimum number of nodes have rejoined.
- Returns
- True if there is a restart quorum, false if there is not
Definition at line 157 of file restart_state.cpp.
◆ make_next_view()
| std::unique_ptr< View > derecho::RestartLeaderState::make_next_view |
( |
const std::unique_ptr< View > & |
curr_view, |
|
|
const std::vector< node_id_t > & |
joiner_ids, |
|
|
const std::vector< std::tuple< ip_addr_t, uint16_t, uint16_t, uint16_t, uint16_t >> & |
joiner_ips_and_ports |
|
) |
| |
|
static |
Constructs the next view from the current view and a list of joining nodes, by ID and IP address.
This is slightly different from the standard ViewManager::make_next_view because it gets explicit inputs rather than examining the SST, and assumes that all nodes marked failed in curr_view will be removed (instead of removing only the "accepted changes").
- Parameters
-
| curr_view | The current view, including the list of failed members to remove |
| joiner_ids | The list of joining node IDs |
| joiner_ips_and_ports | The list of IP addresses and ports for the joining nodes |
| logger | |
- Returns
- A View object for the next view
Definition at line 439 of file restart_state.cpp.
◆ print_longest_logs()
| void derecho::RestartLeaderState::print_longest_logs |
( |
| ) |
const |
◆ receive_joiner_logs()
| void derecho::RestartLeaderState::receive_joiner_logs |
( |
const node_id_t & |
joiner_id, |
|
|
tcp::socket & |
client_socket |
|
) |
| |
|
private |
Helper method for await_quorum that processes the logged View and RaggedTrims from a single rejoining node.
This may update curr_view or logged_ragged_trim if the joiner has newer information.
- Parameters
-
| joiner_id | The ID of the rejoining node |
| client_socket | The TCP socket connected to the rejoining node |
Definition at line 173 of file restart_state.cpp.
◆ resend_view_until_quorum_lost()
| bool derecho::RestartLeaderState::resend_view_until_quorum_lost |
( |
| ) |
|
Repeatedly attempts to send a new restart view, recomputing it on each failure, until either there is no longer a restart quorum or the view was sent successfully to everyone.
- Returns
- True if the view was sent successfully, false if the quorum was lost
Definition at line 328 of file restart_state.cpp.
◆ send_abort()
| void derecho::RestartLeaderState::send_abort |
( |
| ) |
|
Sends an Abort message to all nodes that have previously been sent the restart View, indicating that they must go back to waiting for a new View.
Definition at line 349 of file restart_state.cpp.
◆ send_commit()
| void derecho::RestartLeaderState::send_commit |
( |
| ) |
|
Sends a Commit message to all members of the restart view, then closes the TCP sockets connected to them.
Definition at line 389 of file restart_state.cpp.
◆ send_prepare()
| int64_t derecho::RestartLeaderState::send_prepare |
( |
| ) |
|
Sends a Prepare message to all members who are currently ready to restart; this checks for failures one more time before committing.
- Returns
- -1 if all sends were successful; the ID of a node that has failed if sending a Prepare message failed.
Definition at line 356 of file restart_state.cpp.
◆ send_restart_view()
| int64_t derecho::RestartLeaderState::send_restart_view |
( |
| ) |
|
Sends the currently-computed restart view, the current ragged trim, the current location of the longest logs (the "shard leaders"), and the DerechoParams to all members who are currently ready to restart.
- Returns
- -1 if all sends were successful; the ID of a node that has failed if sending the View to a node failed.
Definition at line 257 of file restart_state.cpp.
◆ take_restart_view()
| std::unique_ptr<View> derecho::RestartLeaderState::take_restart_view |
( |
| ) |
|
|
inline |
◆ update_curr_and_next_restart_view()
| std::unique_ptr< View > derecho::RestartLeaderState::update_curr_and_next_restart_view |
( |
| ) |
|
|
private |
Updates curr_view and makes a new next_view based on the current set of rejoining nodes during total restart.
- Returns
- The next view that will be installed if the restart continues at this point
Definition at line 410 of file restart_state.cpp.
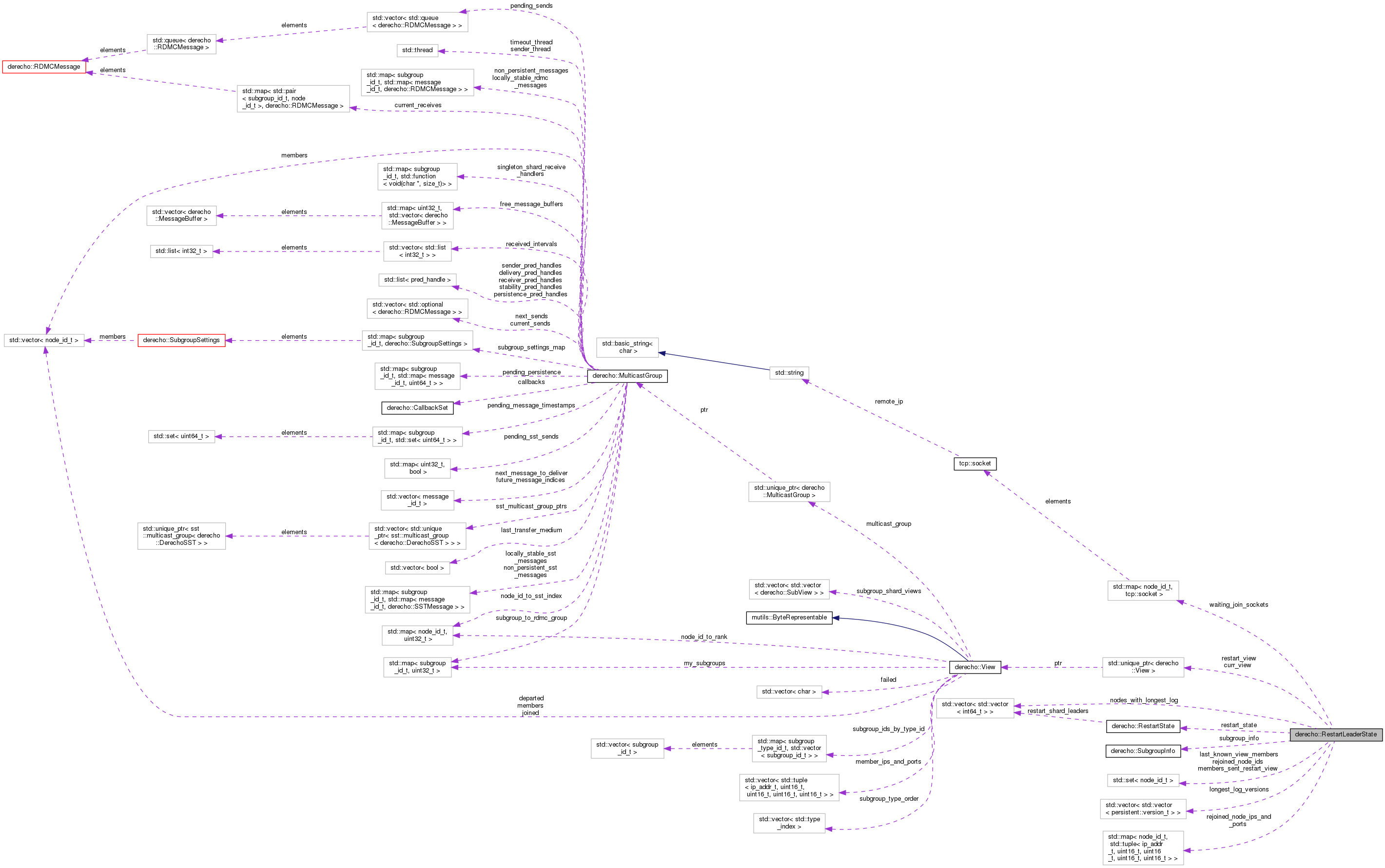
◆ curr_view
| std::unique_ptr<View> derecho::RestartLeaderState::curr_view |
|
private |
Takes ownership of ViewManager's curr_view pointer, because await_quroum() might replace curr_view with a newer view discovered on a restarting node.
Definition at line 85 of file restart_state.hpp.
◆ last_known_view_members
| std::set<node_id_t> derecho::RestartLeaderState::last_known_view_members |
|
private |
◆ longest_log_versions
◆ members_sent_restart_view
| std::set<node_id_t> derecho::RestartLeaderState::members_sent_restart_view |
|
private |
◆ my_id
| const node_id_t derecho::RestartLeaderState::my_id |
|
private |
◆ nodes_with_longest_log
| std::vector<std::vector<int64_t> > derecho::RestartLeaderState::nodes_with_longest_log |
|
private |
◆ rejoined_node_ids
| std::set<node_id_t> derecho::RestartLeaderState::rejoined_node_ids |
|
private |
◆ rejoined_node_ips_and_ports
| std::map<node_id_t, std::tuple<ip_addr_t, uint16_t, uint16_t, uint16_t, uint16_t> > derecho::RestartLeaderState::rejoined_node_ips_and_ports |
|
private |
◆ RESTART_LEADER_TIMEOUT
| const int derecho::RestartLeaderState::RESTART_LEADER_TIMEOUT = 2000 |
|
static |
◆ restart_state
◆ restart_view
| std::unique_ptr<View> derecho::RestartLeaderState::restart_view |
|
private |
◆ subgroup_info
| const SubgroupInfo& derecho::RestartLeaderState::subgroup_info |
|
private |
◆ waiting_join_sockets
The documentation for this class was generated from the following files:


 1.8.13
1.8.13